Après avoir fait 20 années de vol à voile grandeur, un peu plus de 1200
heures de vol dont 600 heures en tant qu'instructeur, je me suis mis au
vol à voile RC. J'ai réalisé la plus grande partie de ces heures en vol de
plaine, le reste étant réalisé en montagne, dans les Alpes du sud et un
peu de Jura. J'ai dû piloter une trentaine de planeurs et moto planeurs,
du Fauconnet A60 au Nimbus 4D, mais ma préférence va vers les planeurs en
bois et toile, mon préféré est l'ASK13, certainement car c'est sur
celui-là que j'ai fait mon premier vol solo. Ayant fait essentiellement du
vol de plaine, c'est le vol en ascendances thermiques que je connais le
mieux, mais j'ai eu l'occasion de pratiquer régulièrement le vol de pente
et plus rarement le vol d'onde. Les décollages ont été réalisés en
remorquage et au treuil, le treuil que je connais aussi depuis sa cabine
pour avoir lancé de nombreux planeurs. On aurait pu dire que tout allait
pour le mieux dans le meilleur des mondes,..., et pourtant... L'ambiance des clubs parisiens en plus des contraintes
liées à l'activité ont eu raison de ma motivation. J'ai pu retrouver dans
le vol à voile RC un peu des sensations du grandeur mais il me manquait
toujours cette donnée capitale : la Vz ... la valeur de l'ascendance. Je n'aurais
jamais imaginé un vol en planeur grandeur sans un bon vario, rythmé
généralement par son bip bip. Je me rappelle même m'être posé
volontairement 10 min après mon décollage pour régler un problème de vario
défaillant. Avec certains planeurs assez lourds, on peut traverser
l'ascendance sans même s'en rendre compte et ce d'autant plus qu'elle
est faible. C'est vrai aussi qu'avec certain planeur léger de style Ka 8
ou Ka 6 on peut ressentir l'ascendance aux fesses mais plus difficilement
la centrer. Les variomètres audio ne sont pas ou rarement dans les
planeurs anciens du fait de l'instrumentation sommaire et
généralement pneumatique. Ils ont fait leur apparition dans les années 70
en apportant énormément à la sécurité, n'obligeant plus le pilote à
regarder régulièrement l'instrument à l'intérieur de la machine et
consacrer ainsi le maximum de son temps le nez dehors. Un bon vélivole est
capable après un tour de spirale de se représenter mentalement la forme et
le volume de l'ascendance, pour continuellement adapter la trajectoire du
tour suivant.
J'ai toujours trouvé étonnant que peu de vélivole RC n'investissent pas
plus dans un variomètre. Il est interdit en compétition, c'est vrai, mais
je suis convaincu des bienfaits qu'il aurait sur le compétiteur pendant
son entraînement. Du coup celui-ci ne s'est pas démocratisé et il est
resté d'un prix pas
franchement abordable. Pour ma part, il n'est pas impératif
d'avoir un vario dans un planeur RC pour trouver les ascendances, il
suffit d'observer le planeur pour avoir des informations mais à partir
d'une certaine hauteur, je met n'importe qui au défi de centrer une
ascendance.
Centrer une ascendance, peut t'on sérieusement dire qu'on
centre une ascendance sans avoir une indication précise de la valeur de
celle-ci ...???
C'en était trop, lors d'un vol thermique particulièrement long, j'ai
croisé de nombreuses ascendance sans jamais vraiment savoir ce qu'il
en était, je restais haut pour pouvoir transiter entre deux ascendances,
je me mettais en spirale au petit bonheur la chance pour constater
quelques tours plus tard que ça montait ... ou pas. Pour résumer : du
grand n'importe quoi !
Après investigation poussée des sites Internet dédiés, je repérais les
divers modèles qui pouvaient me convenir.
plus quelques autres produits qui n'ont même pas lieu d'exister à cause
de leur manque de précision.
En fonction de ce que je recherchais, le Picolario et Tek-Variometer
étaient en tête. Pour les autres, c'était soit trop cher et avec des
fonctions inutiles, ou alors des écrans qui servent à rien quand on
regarde le planeur, ou alors trop basique pour l'utilisation que je
voulais en faire ou alors trop lourd avec une partie logger +
transmetteur,.... Mais une certitude, aucun ne fonctionnait en langue
française (altitude, menus, tension ...)
C'est après de longues recherche que je suis arrivé sur le site de
Pitlab et de son variomètre Sky-Assistant. Le site en polonais et en
anglais ne m'a pas facilité la tâche, après plusieurs heures de lectures, je venais de découvrir le
produit adapté à mon utilisation.
Des inconnues subsistaient pourtant. Picolario et Skymelody pouvaient
être vendus avec une antenne de compensation mais pas le Skyassistant.
J'envoie donc un mèl à Pitlab qui me répond dans les 10 min. Bon, déjà
c'est réactif. Piotrek le boss de Pitlab, petite entreprise de Varsovie
m'explique que les essais sur l'antenne de compensation sont en cours afin d'être certain de vendre un
bon produit mais que je peux éventuellement acheter une antenne de Picolario qui fera le même effet.
L'antenne de compensation est à mon goût primordiale sur des planeurs
assez fin et chargés qui restituent beaucoup dans les ressources,
l'objectif n'étant pas de savoir si le planeur monte quand on tire sur le
manche (tout le monde s'en doute) mais surtout de savoir si pendant que le
planeur effectue sa ressource il est bien dans l'ascendance (voir site
dédié sur les vario compensés).
Après quelques échanges de mèls avec Piotrek pour connaître entre
autres le montant du port, délais, compatibilité avec les récepteurs, la
TVA... je décidais de franchir le pas.
Paiement avec Paypal pour la sécurité, le Skyassistant m'a fait
déboursser 249€ TTC. Piotrek m'avait indiqué une semaine pour
la livraison depuis la Pologne, telle n'était pas ma surprise de voir
arriver mon Skyassistant en 3 jours chrono. Extrêmement rapide d'après
Piotrek (NOTA : Aujourd'hui le SkyAssistant ne peut plus être acheté
directement en Pologne, c'est de toute façon sans intérêt dans la mesure
ou un distributeur Français le vend au même prix).
Pour revenir sur le prix, ce n'est quand même pas rien surtout si on
ramène tout ça au prix du kilo .... 13 000 €/Kg, compte tenu que la bête
ne pèse que 22 gr . Et encore, je n'ai pas le récepteur radio pour lequel
j'ai rajouté 150€ (pour 2 Talkie-Walkies). soit un total TTC pour l'équipement complet de ... 399€
(285€ avec la radio proposée par Pitlab).
Je reviendrais plus loin sur le récepteur radio.
Caractéristiques
Skyassistant
Voila les raisons pour lesquelles j'ai choisi le Skyassistant de Pitlab.
- Taux de montée/descente : 5 cm/s
-
Altimètre résolution altitude : 1 m
-
Étendue d'altitude : + ou - 3000 m
-
T° de fonctionnement : -20 à +100°C
-
Dimension : 70 x 26 x 10 mm
-
Masse : 22 g !!!
-
Alimentation : 3.5 à 12 V
-
Conso à 4.8 V : 50 mA
Fonctions du Skyassistant :
-
Variomètre + compensation (TEK)
-
Altimètre
-
T° intérieure (sonde sur le circuit)
-
T° extérieure (sonde externe LM335)
-
Mesure de la tension batterie par 0.1 V + alerte à seuil programmable
-
Analyseur de signaux PPM *** (% de coupure du signal de réception de la radio)
***Le Skyassistant sera 100% compatible quelque
soit la radio et le récepteur, dans la mesure ou la qualité du signal de
réception est analysé depuis la sortie du récepteur (signal du récepteur aux
servos). Beaucoup de choses ont évolué dans les fréquences (27, 35, 41, 72,
2.4), le codage PPM, PCM, servos numériques et analogiques ... mais la trame
qui va du récepteur aux servos n'a pas évoluée.
-
Logger avec très grande capacité (stockage de 1 800 000 données) (Pour info
: logger = enregistreur)
-
Générateur vocal en français pour les annonces (Alt, tension, + alertes
programmables)
-
Émetteur sur canal LPD433 ou PMR446
-
Programmation possible sur le terrain par l'intermédiaire de la voie radio sur
laquelle il est branché
Livré avec câble USB pour déloggage sur PC.
Clé USB 2 Go sur laquelle il y a tous les software, pilote USB ...
Notice simplifiée en Français.
Pour une utilisation avec les contraintes de masse les plus serrées mais
surtout d'encombrement, le capteur de température peut être débranché, les
données de T° ne seront bien évidemment plus loggées.
Caractéristiques
Récepteur radio
Le principe de base du Skyassistant est de détecter la
hauteur et les changements de hauteur pour les interpréter en Altitude (en
réalité en hauteur car l'altitude est par rapport à la mer et la hauteur
par rapport à l'altitude de décollage) et en vitesse de montée ou de
descente, puis de transmettre le tout au sol par une information vocale
(bip bip + annonces alt/tension/...).
Le Skyassistant n'ayant pas son récepteur radio dédié, celui-ci émet sur
les fréquences LPD433 ou PMR446 MHz. L'achat d'un Skyassistant impose donc
en plus l'achat d'un récepteur radio portatif plus communément appelé
Talkie-Walkie.
Quitte à acheter du matériel, autant en acheter qui soit réutilisable pour
d'autres applications, c'est pourquoi j'ai décidé d'acheter un pack duo
comprenant donc deux combinés du modèle Midland G8 en version Export d'une
puissance de 3W. La portée théorique en émission en champs libre est de 12
kms en PMR446.
J'ai par ailleurs eu quelques avis concernant les radios des plus bas
prix, qui en utilisation crachouillent, soufflent ... Avec la G8, pas un
son autre que le vario et les annonces ne sort !!! C'est très confortable
pour une utilisation prolongée.
Je pense qu'il est dommage d'économiser une dizaine d'€uros sur la radio
alors qu'on en a mis 250 dans le vario. Il ne faut pas oublier que la
chaine audio ne s'arrête pas à la sortie du vario mais à votre oreille. La
radio a aussi une grande importance dans le système.
Attention lors de l'achat !!!, il existe
deux modèles de Midland G8 : le Bi bande (PMR446/LPD) et la version E
(PMR446 uniquement) au même prix, même si tous ces canaux ne sont pas
utiles ...
Détail du modèle Bi bande :
- Puissance 500mW/3W
sélectionnable en PMR446, 10mW en LPD
- 38 tonalités CTCSS/104 codes DCS (ces codes permettent de communiquer
seulement avec les utilisateurs qui sont sur le même canal et avec le même
code)
- Appel d'urgence
- VOX : utilisation comme un téléphone portable en bidirectionnel
permanent
- Intercom
- Vibreur
- Double veille (on peut écouter deux canaux en même temps)
- Scan
- Out of Range (avertissement dès la perte de portée)
- 112gr
- Alimentation : pack 4.8V NiMH 800 mAh ou 4 piles AAA LR3
- Autonomie : 8h en conversation (surestimé certainement), 24h en veille
Au moment de passer à l'attaque, on se demande quand
même par où attaquer. Il y a une interaction importante entre le
Skyassistant (variomètre hardware) et le logiciel de configuration appelé "Vario".
Après un petit temps d'adaptation, on comprend vite qu'on peut programmer
indépendamment le logger, la programmation de
l'acoustique (l'audio) du vario et le graphique résultant de
l'enregistrement du vol (log).
Démarche à suivre pour la mise en service :
1 Copier tout le contenu de la clé Usb fournie
dans un dossier "Skyassistant" créé dans le Progamm Files du C:/.
2 Ouvrir le dossier "software" créer un
raccourci (clic droit) du fichier "vario.exe" (vario) vers le bureau.
3 Lancer le logiciel "Vario"
depuis le bureau ou depuis son dossier C:/Programm Files/Skyassistant pour
vérifier son bon fonctionnement. Puis quitter le logiciel "Vario"*.
4 Retourner dans le dossier C:/Programm Files/Skyassistant,
dans le dossier "Usb driver" lancer le "CDM_setup" qui installe
les pilotes du SkyAssistant.
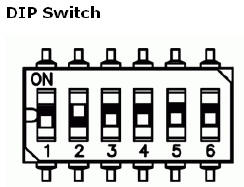
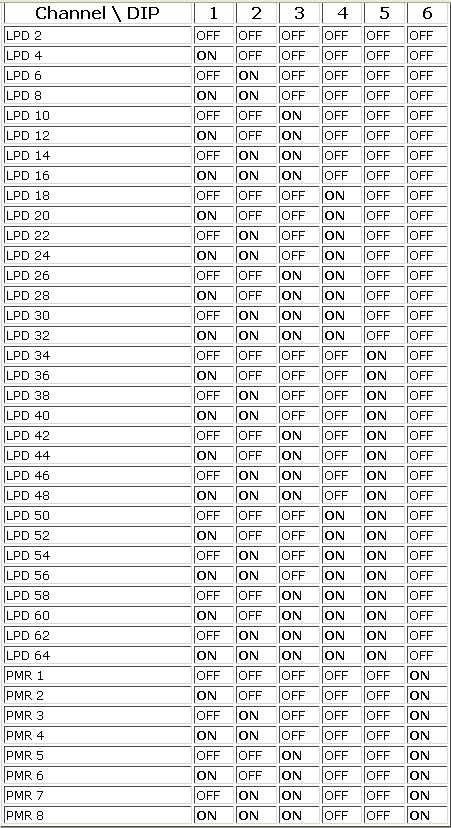
5 Mettre les DIP Switch du Skyassistant sur le
canal désiré (canal 6 LPD par défaut) et mettre en marche la radio sur le même canal.
Cliquer
pour agrandir
6 Puis branchement du Skyassistant sur le PC par
le câble USB. Votre PC met à jour le pilote à la première utilisation,
dans le même temps le variomètre s'initialise (message audio, radio en
marche)
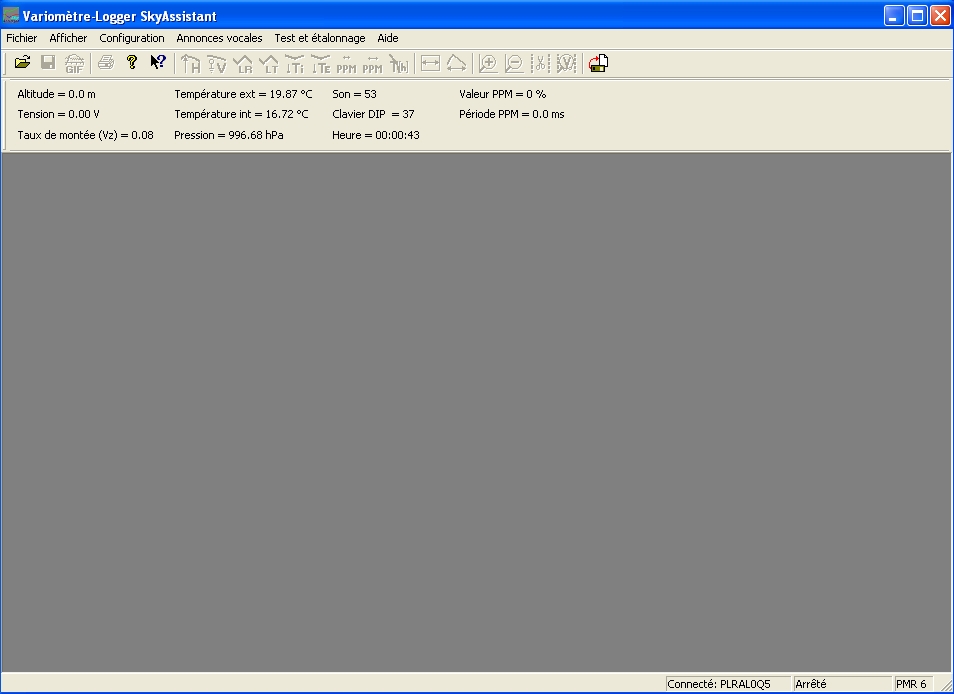
7 Lancer le logiciel "Vario" et cliquer sur
l'icône pour voir apparaître les
premières données. Interrogation
du Skyassistant sur les paramètres en cours
*Attention : ne lancer le logiciel "Vario" seulement après
avoir branché le SkyAssistant sur le PC et attendre la fin de
l'initialisation sous peine de ne pas pouvoir
établir de communication entre les deux parties.
Le Skyassistant peut être branché en même temps sur la
prise USB et sur l'accu, les deux alimentations étant séparées, ce qui permettra de lire
la tension de l'accu.
Skyassistant
Configuration
A noter que les menus présentés ci-dessous sont ceux que
j'utilise en vol régulièrement, très bien pour une première utilisation du SkyAssistant.
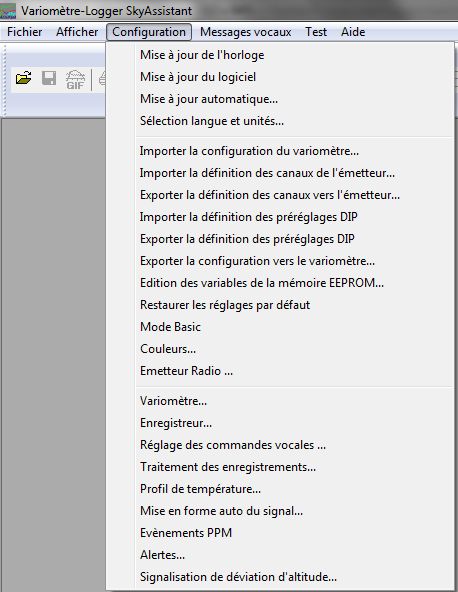
Pour configurer le skyassistant se rendre au menu
"Configuration"
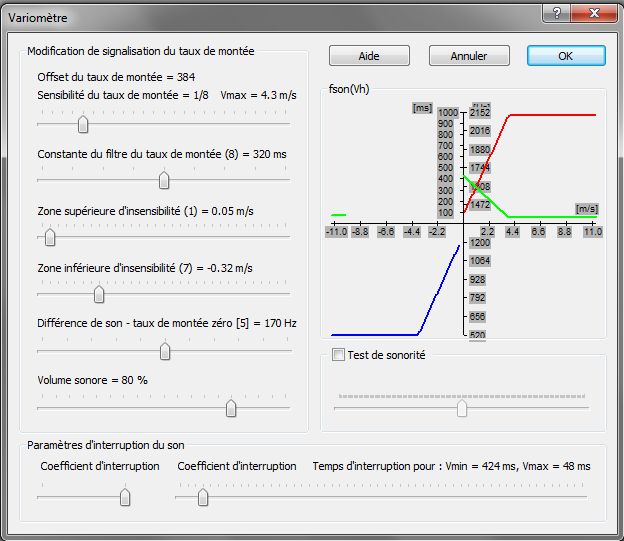
Le variomètre :
Pour faire les premiers tests du variomètre j'ai
simplement utilisé l'escalier en faisant des allers et retours du rez de
chaussée au premier étage. Me concernant, la configuration par défaut ne
correspond pas bien à cette utilisation car l'échelle de détection va de +
12m/s à - 12m/s (menu : configuration/variomètre). A moins d'avoir la forme, ça va être dur à respecter, et
surtout on entendra pas grand chose lors des montées et descentes. Pour
info, et après coup, la montée des marches se fait à +0.5m/s sans courir.
Dans le menu variomètre, j'ai mis pour mes premiers essais dans la maison le minimum (+ 1.1m/s, - 1.1m/s) ce qui
me permet d'entendre toute la plage du bip bip.
Me voila reparti à monter et descendre et là c'est
magique. Résultat impeccable.
Lors de l'utilisation sur le planeur RC, je placerai le
curseur sur + ou - 4.5 m/s, compte tenu que les ascendances dans nos régions
parisiennes ne passent que très rarement au delà. Par expérience de mes
vols en planeur grandeur, une ascendance moyenne est à 2 m/s, plus
rarement à 3 m/s, et très exceptionnellement au delà. L'expérience du
variomètre en planeur RC me permettra d'affiner tout ça. Pour mes essais
j'ai mis la constante de temps du filtre de montée sur 80 ms, peut être
160 ms sera bien dans une utilisation réelle afin de lisser les prises de
données et d'éviter des passages successifs du vario sonore des aigues au
graves lors de turbulences.
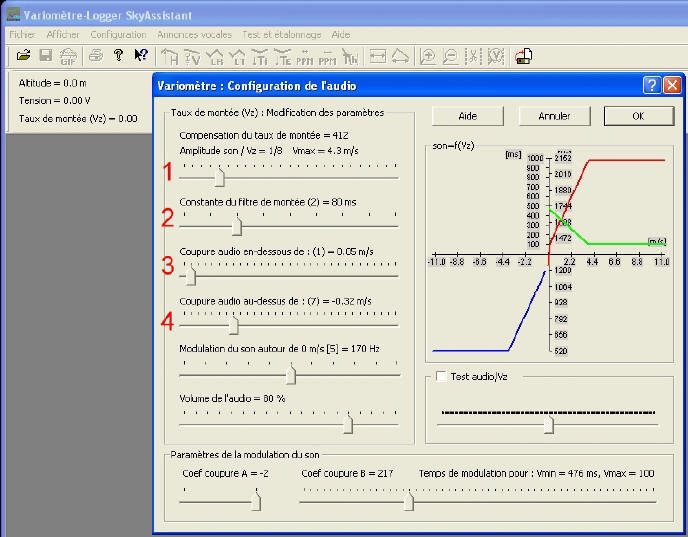
Dans ce menu on peut vraiment tout paramétrer. On peut
donc fixer l'amplitude de la tonalité du son par rapport à une Vz max. Ça permet par
exemple de centrer des ascendances faibles en exploitant toute la plage du
signal sonore de l'audio.
On peut couper le son autour de 0m/s et paramétrer les modulations de
manière précise en fonction de ses attentes.
Pour réaliser le test il faut mettre la radio en marche
car c'est par là que va sortir le son.
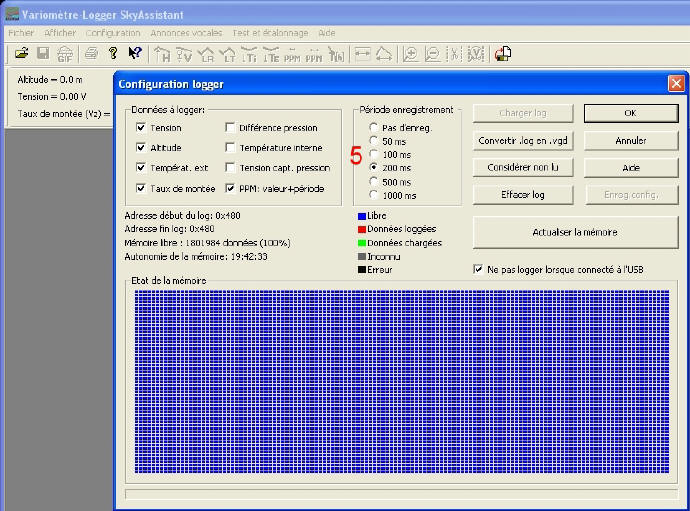
Le logger :
De ce menu on pourra :
- Décharger les logs
qui sont en données binaires (.log), les convertir en fichier texte (.vgd)
pour qu'ils soient repris pour étude (fichier / ouvrir) par "Vario" ou
exploités par exemple par Excel.
- Vider la mémoire.
- Sélectionner les données à logger.
- Régler la période d'enregistrement du logger.
Je suis impressionné par la capacité de stockage du skyassistant (capacité
: 1 800 000 données). J'ai décidé de logger la tension, l'altitude, la T°
extérieure, le taux de montée, et le signal PPM, et ce, toutes les 200ms.
Ce qui me fait une autonomie d'enregistrement de 19h40.
Pour information, en loggant toutes les 50ms => autonomie 3h25, en loggant
toutes les 1000ms => autonomie 82h07. On pourrait aussi utiliser le
Skyassistant en loggant 1 seul paramètre, pour faire un relevé de T° pour tester une installation de
chauffage par exemple, relever des évolutions de tension... à raison d'un
relevé par seconde, qui donne 492 h d'autonomie soit 21 jours.
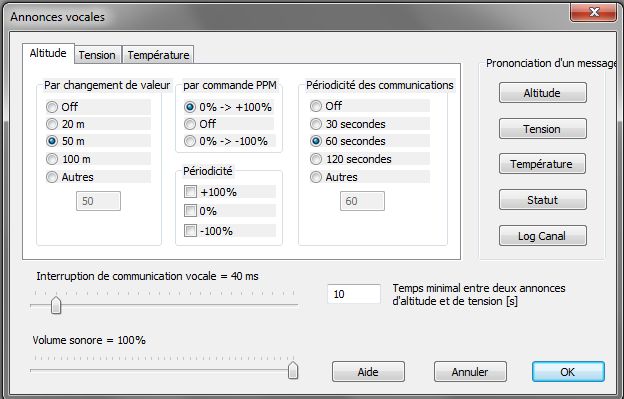
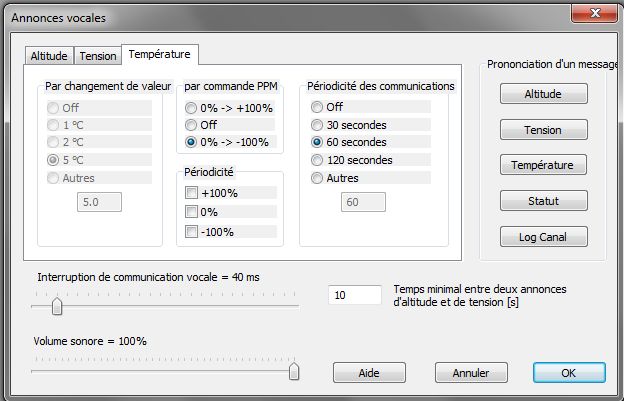
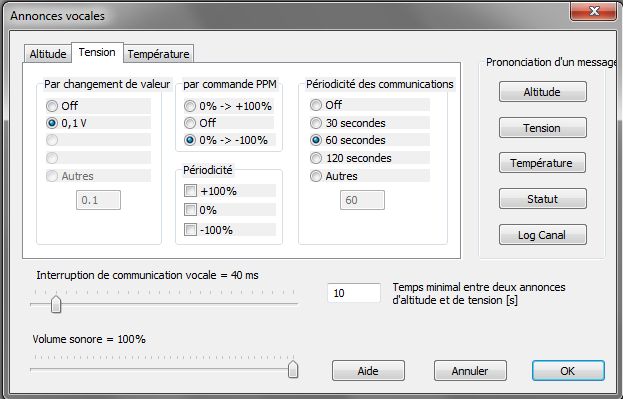
Réglage commandes vocales :
C'est depuis là qu'on va pouvoir programmer les types d' interventions pour
annoncer l'altitude, tension et température.
Par exemple, pour la température, j'ai choisi une
intervention tous les 25m ou toutes les 30 secondes si mon altitude n'a
pas évoluée de +ou- 25m dans les dernières 30s.
Le menu "Réglage des commandes vocales" possède des
curseurs et des coches (PPM Commande et PPM inter 3 pos.) communes avec le
menu "Annonces PPM" décrit plus bas.
J'ai choisi d'annoncer tous les 25m.
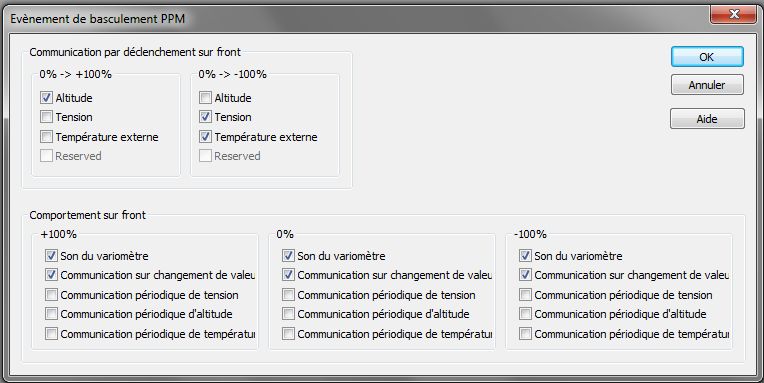
Annonces PPM :
Depuis ce menu on pourra configurer la commande du Skyassistant depuis la
télécommande par le déplacement d'un manche ou interrupteur 3 positions. Il
faudra pour faire les essais brancher le skyassistant sur un récepteur sur
la voie de votre choix. A partir de la prog réalisée, on pourra sur
commande annoncer les divers paramètres désirés par simple
basculement de l'inter ou du manche en +100% ou - 100%. (déclanche à + ou
- 20% en réalité)
De plus, dans ce menu, deux possibilités vous sont
offertes : vous avez une commande libre, on peut alors sélectionner
l'annonce à réaliser pour chaque déplacement de la commande, avant ou
arrière. Dans le cas ci-dessous, un axe du manche droit étant libre, j'ai
décidé qu'un basculement vers l'avant annonçait l'altitude, un basculement
vers l'arrière annonçait la température et la tension batterie.
Dans le cas du choix de programmation avec un inter 3
positions, on peut programmer des environnements différents pour chacune
des 3 positions de l'inter (type d'annonce, vario actif ou pas...) A noter
qu'un basculement d'inter bref permet toujours d'annoncer les données
programmées pour un déplacement de commande.
Le menu "Annonces PPM" possède des curseurs et
des coches communes avec le menu "Réglage des commandes vocales" décrit
plus haut.
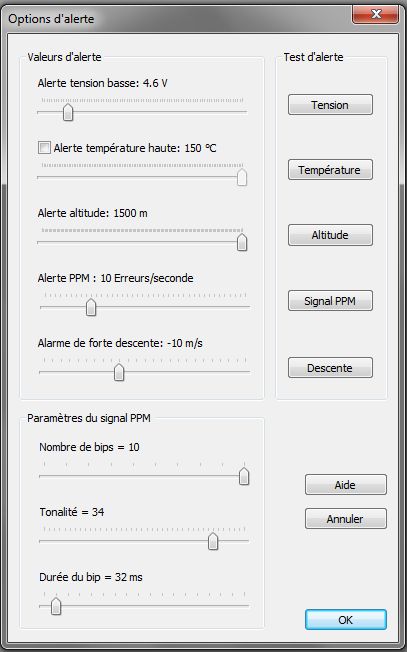
Alertes :
On peut aussi paramétrer les alertes en T°, altitude, tension qualité
signal PPM et descente . La température permet de surveiller l'échauffement d'un
variateur, accus ou moteur par exemple. L'altitude peut être intéressant
si on est surmonté par une zone interdite, qui est mon cas avec la Zone A
de Roissy Charles De Gaulle à 450m sol. L'alerte en tension avertira de la
tension basse de l'accu et l'alerte PPM d'une mauvaise réception radio.
L'alerte de forte descente permet de vous prévenir que votre modèle est en
piqué ou tout au moins en descente prononcée suite peut être à une erreur
de pilotage ou une turbulence. Cette fonction peut peut être sauver votre
planeur de la casse suite à une prise de vitesse excessive.
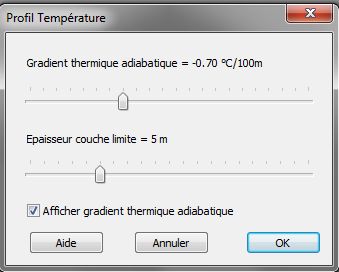
Gradient thermique adiabatique :
Cette fonction n'est pas capitale mais permet tout de même de connaître
les caractéristiques de la masse d'air dans laquelle on évolue. On peut
paramétrer la droite de refroidissement adiabatique sec qui est
le refroidissement normal et régulier par la détente de l'air avec l'altitude. La valeur
standard est de - 0.976°C / 100m d'élévation, on pourra arrondir à
0.98°C/100m. Cette droite
apparaîtra sur le graphique proche de l'axe des ordonnées (vertical) et
servira à la comparaison. La courbe du gradient thermique adiabatique réel dépend de la température, la pression mais aussi de l'humidité de
l'air et représente le refroidissement de la bulle d'air "chaud"
(ascendance) qui va perdre sa température suite à une baisse de pression
liée à son élévation (détente adiabatique). Le refroidissement adiabatique
de notre ascendance est par définition sans échange avec le milieu
extérieur. Le nuage de point loggé par le
SkyAssistant pendant le vol va être traité et représenté par une droite
qui finalement est une régression linéaire de ce nuage de point. La pente
de cette droite pourra être comparée à la droite de l'adiabatique sèche.
Le choix de l'épaisseur de la couche de surface va permettre de supprimer
les enregistrements à proximité du sol compte tenu que l'air à proximité
de celui-ci à souvent des caractéristiques différentes de
température et d'humidité qui risquerait de fausser les résultats. 5 à 10
m me parait bien.
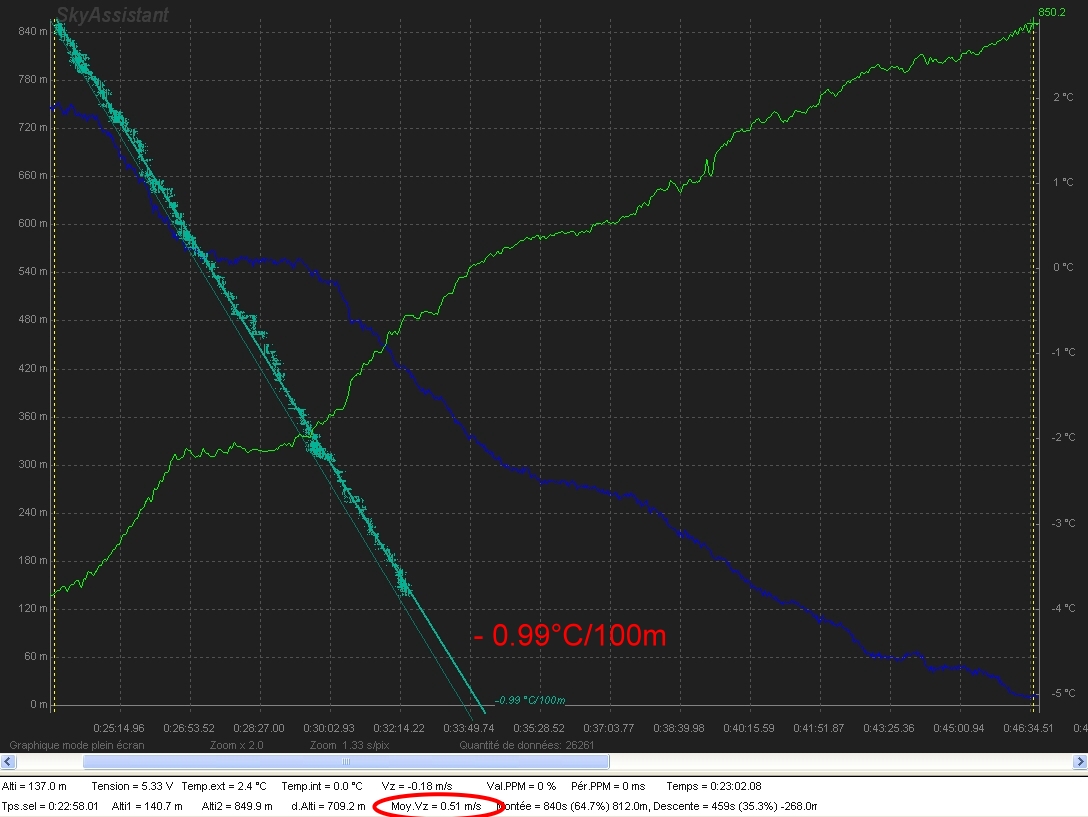
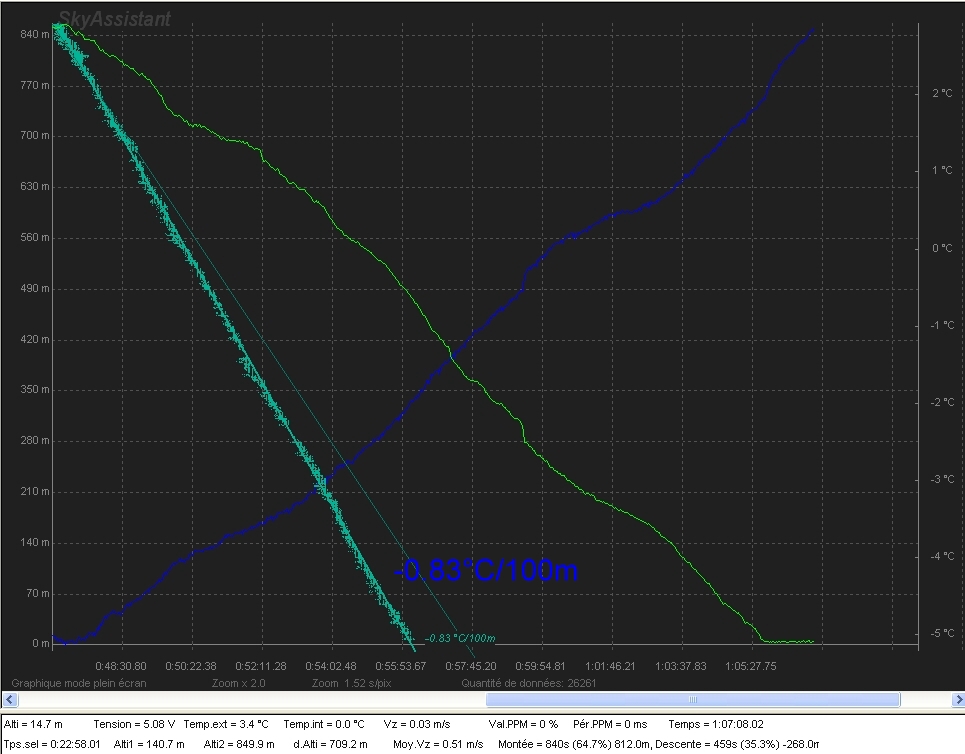
Détail d'un vol du 12 04 2008 jusqu'à 852m (situé dans les logs de démo du logiciel)
:
Pour permettre l'étude, le log à été recoupé avec excel pour ne laisser
que la partie la plus représentative du vol, afin de mieux expliquer le
rôle des courbes.
On peut observer un faible écart
entre la courbe de montée dans l'ascendance et la descente dans la
masse d'air environnant l'ascendance (flèches vertes). Le faible
différentiel donne de faibles ascendances. La masse d'air est assez
stable.
Montée dans l'ascendance, le
refroidissement est adiabatique (-0.99°C/100m).
L'ascendance est de 0.5m/s, faible compte tenu du
faible différentiel de T°.
Différentiel :
1° d'écart à 300m
0.3° d'écart à 600m
Descente dans la masse d'air
environnant l'ascendance. On aurait sensiblement rencontré les mêmes
températures lors d'un sondage le matin.
Les températures tournent autour de 0° et -5°C, c'est
certainement l'hiver.
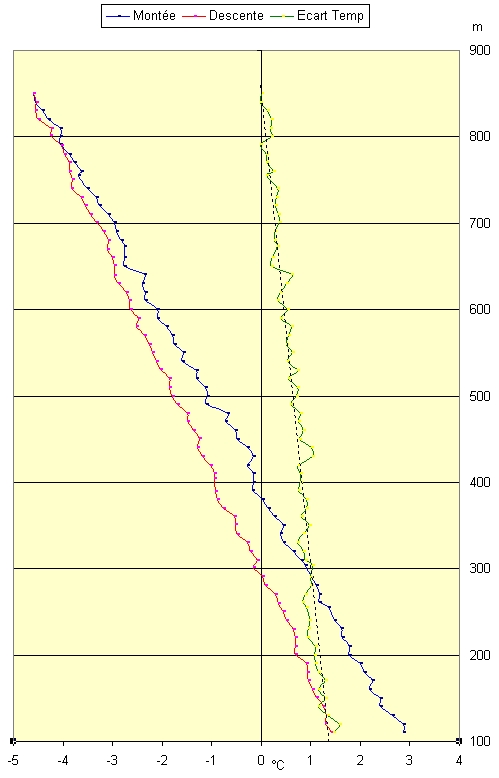
Pour pousser un peu plus loin l'observation, on peut
comparer l'écart entre la température en ascendance et la température hors
ascendance et comparer l'évolution de cet écart par rapport à la Vz rencontrée. Les relevés ont été
repris avec Excel.
Ce premier graphique reprend le tracé proposé par
le SkyAssistant sur la portion de vol concidérée.
En bleu : relevé de T° lors de la montée
En rouge : relevé de T° lors de la descente
En vert : l'écart de T° entre la montée et descente
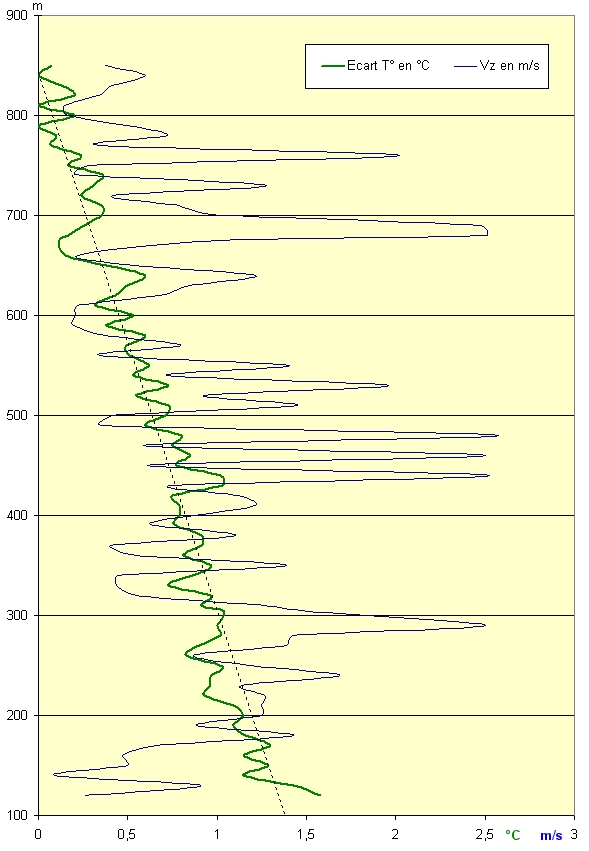
Ce deuxième graphique reprend la courbe verte de
l'écart de température/alt du graphique précédent et vient en
superposition les Vz/alt en bleu.
On peut constater des Vz plus importantes dans les écarts importants
de température.
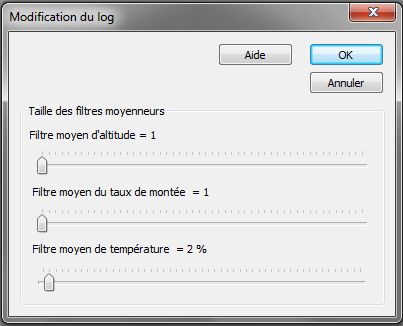
Conversion log => vgd : Nota : Les changement des paramètres de ce menu n'ont aucune
influence sur le mode d'enregistrement des données du logger. Ce menu est
d'ailleurs accessible variomètre non connecté à l'USB.
Ce menu va permettre de placer un filtre de lissage pour les courbes
d'altitude et de Vz. En plaçant le filtre à 1 toutes les données
enregistrées sont affichées sur la courbe. En montant la valeur des
filtres, les données vont être moyennées entraînant ainsi un tracé plus
lisse de la courbe. Cette fonction n'a donc un effet qu'au moment de la
conversion du fichier *.log (fichier sortant du logger) en un fichier *.vgd
(fichier texte permettant l'affichage des graphiques). Personnellement je
n'ai pas placé de filtre, les courbes en dents de scie me conviennent très
bien.
Pour information, la coche "enlever les zéros" des anciennes
versions n'est plus active et est supprimée pour être remplacée par un
bouton d'aide.
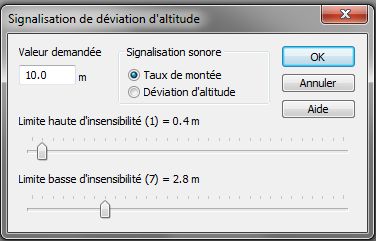
Vario ou Directeur de vol :
Pas utile pour moi, ce menu permet de configurer le vario en directeur de
vol en fixant une altitude de vol à respecter, le vario signalera par un
son aigu une altitude supérieure et par un son grave une altitude
inférieure.
Attention, les deux curseurs sont en relation avec ceux
du menu "Variomètre". Un déplacement de ceux-ci aura une incidence sur la
programmation de la coupure de l'audio autour de 0m/s du menu
"Variomètre".
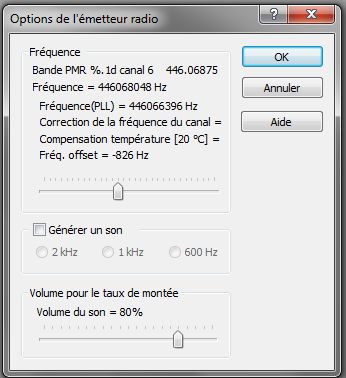
Emetteur radio :
Je le place en dernier car c'est le seul menu que je n'ai encore jamais utilisé.
On peut certes régler le volume du vario mais on peut le régler par
ailleurs (menu Variomètre).
Je viens de détailler les menus de configuration, je
ferai l'impasse sur les nombreux autres menus destinés à la sauvegarde,
mise à jour, étalonnage .... Des heures d'études du système sont à
prévoir tellement les possibilités sont nombreuses et évolutives. Si le
coeur vous en dit, vous pouvez même changer les samples des voix pour
enregistrer vos propres annonces...
Pitlab
sort régulièrement des évolutions des software et firmware que l'on peut
télécharger sur le site et mettre à jour facilement.
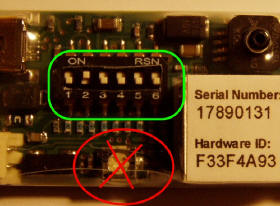
Recommandation !!! Comme vous avez pu le
constater la programmation du SkyAssistant est exclusivement logicielle,
par PC ou Radiocommande (détaillé plus bas). La question qui revient souvent est : quel est le
rôle de la résistance ajustable situé sur le circuit imprimé ? Ne jamais
la manipuler, celle-ci sert à l'étalonnage en usine de la fréquence radio
de l'émetteur. Toute manipulation de ce potentiomètre réduira au silence
votre SkyAssistant !!!
La seule chose qu'il est permis de manipuler est le Dip Swich qui permet
de régler le canal afin d'adapter la fréquence d'émission du SkyAssitant à
celle du récepteur Radio (voir "1ère utilisation")
Branchement
et
installation
1er vol
Compte tenu de son prix, le SkyAssistant devra être
placé dans un endroit peu exposé aux chocs, enroulé dans une mousse ou
bâche à bulles. Veiller tout de même à ne pas boucher la buse du capteur
de pression. Il faudra aussi veiller à placer le vario dans un endroit non
influencé par la pression autre que la pression atmosphérique. L'intérieur
des fuselages peut parfois subir des variations de pression pour
différentes vitesses. Brancher alors un tube en silicone de diamètre 2mm
sur la buse du capteur de pression et emmener l'extrémité de ce tube dans
un endroit neutre. Seuls les essais pourront confirmer le bon placement.
Brancher le vario sur le récepteur afin de pourvoir l'alimenter et mesurer
la tension batterie et les données PPM.
Attention toutefois à placer la prise sur une voie active, programmée sur
la commande. Lors de mon premier essai, j'utilisais une radio 3 voies sur
un récepteur 4 voies. Il était tentant de brancher directement le vario
sur cette 4ème voie libre. Je me suis vite rendu compte que le vario était
bien alimenté mais ne dépassait pas la phase d'initialisation compte tenu
des informations PPM erronées envoyée par le récepteur au vario depuis
cette voie (voir plus bas la configuration par radiocommande). J'ai du extraire le connecteur PPM de la fiche pour que tout
rentre dans l'ordre.
Le premier vol d'essai s'est fait sur mon brave vieux Spirit motorisé de
19 ans d'âge. Les premières utilisations nécessites plus d'attention en
vue de ne rien oublier . Pour recevoir les infos du SkyAssistant, j'ai
branché une oreillette sur la G8.
Toute la pré vol étant effectuée, gaz à fond puis lancer. A la mise des
gaz le vario s'affole un peu mais c'est tout à fait normal. En planeur
grandeur on a le même effet à la mise des gaz du remorqueur. Une fois en
l'air j'ai vraiment retrouvé la sensation du planeur grandeur, même
sonorité, même réponse, je suis bluffé par l'efficacité du système. J'ai
surtout été surpris lors des annonces d'altitudes que finalement je
sous-estimais (50 à 60m pour moi => en réalité 100m), étonnant compte tenu
qu'on a toujours l'habitude de surestimer sa hauteur. La
masse d'air est complètement stable ce qui me permet de faire des relevés
de taux de montée au moteur et taux de chute à diverses vitesses (voir
ci-dessous).
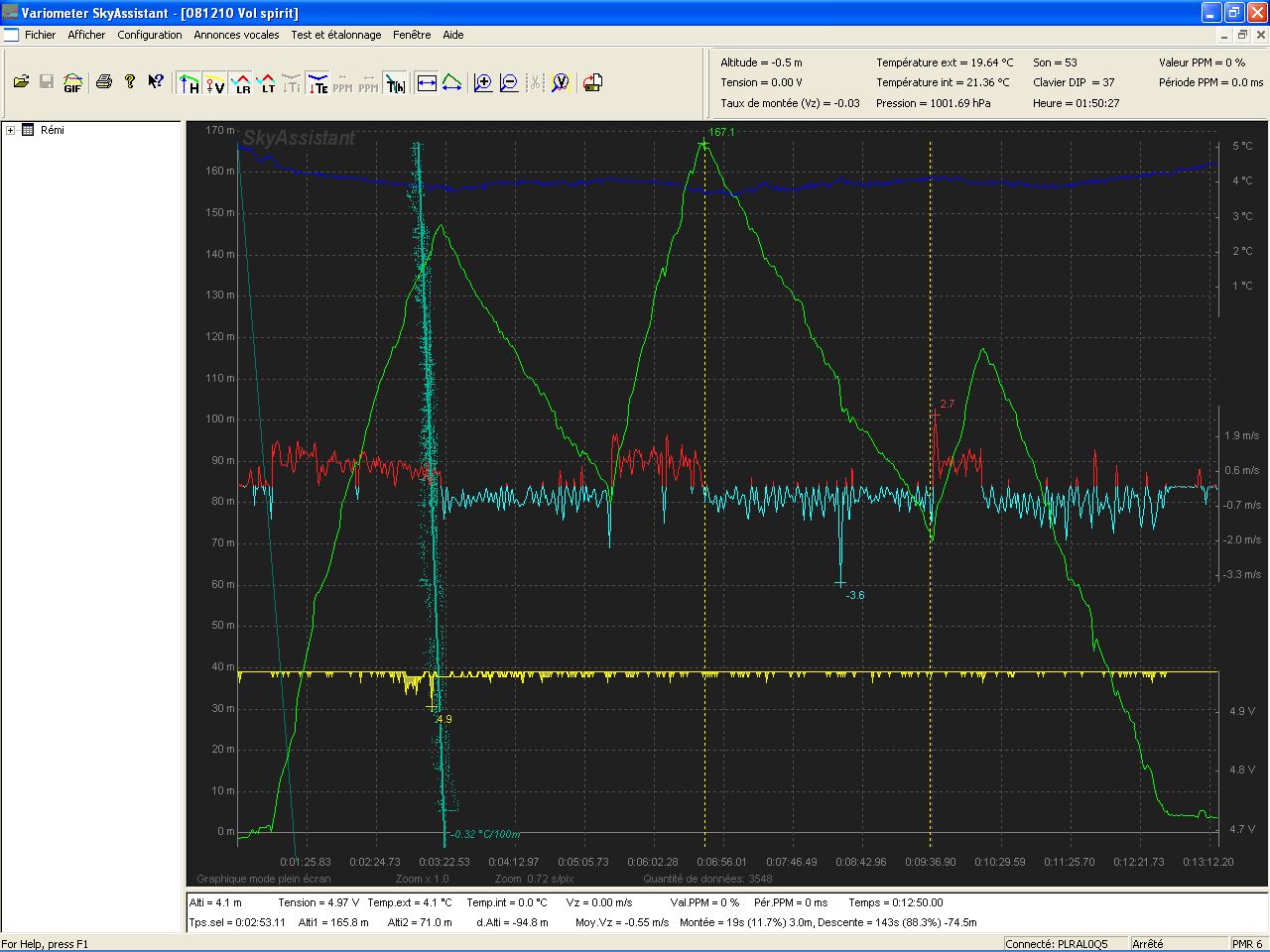
Lecture et interprétation des données
Après avoir récupéré les données du logger (*.log) puis de les
avoir transformées en données textes exploitables par le logiciel "Vario"
(*.vgd), il ne
reste qu'à ouvrir le fichier juste créé pour visualiser le ou les vols
qu'on peut exploiter individuellement. On peut éditer des statistiques
entre deux séquences de vol par les deux barres verticales jaunes et tirer des
conclusions sur cette seule séquence.
Premier
vol d'essai du SkyAssistant.
Dépouillement des données
du premier essai : grâce à la possibilité de sélectionner certaines
séquences de vol, j'ai pu étudier la phase de montée au moteur, la phase
de plané au taux de chute mini et la phase de transition à une vitesse
légèrement supérieure.
Phase de montée
Le Spirit est sous-motorisé et ça se voit, la
montée est poussive à :
Vz = 1 m/s
Vi taux de chute mini
C'est la vitesse que j'utilise dans les ascendances
: le taux de chute mini est de :
Vz = - 0.50 m/s
Vi finesse max
C'est la vitesse de transition qui n'est
certainement pas la vitesse de finesse max mais c'est à ce taux de chute
que j'évolue entre deux ascendances :
Vz = - 0.80 m/s
En approximant la vitesse du Spirit à 20 - 25 km/h, sa
finesse oscille entre 11 et 13 ... Pas extraordinaire tout ça.
L'outil est simple
d'utilisation et ne nécessite pas de plus amples détails. On peut
sauvegarder des images en Gif des traces, les imprimer.
On peut laisser sur le
forum dédié de Pitlab ses records d'altitude et éventuellement les
commenter.
Si besoin est, il est aussi possible de récupérer les données dans un
tableur. Avec Excel par exemple : clic droit sur le fichier converti en .vgd
(celui qui s'ouvre avec le logiciel "Vario") puis "Ouvrir avec",
choisir exel dans la liste. Les données ainsi récupérées
pourront être traitées différemment (dans le cas par exemple d'un suivi de
température d'une installation sur plusieurs jours). Si vous voulez
supprimer une partir d'un vol en vue d'une étude, supprimer les lignes
indésirables et enregistrer en gardant l'extension .vgd. Vous pouvez
maintenant rouvrir le fichier avec le logiciel vario.
Mes
vols
significatifs
Vol du 17 mars 2009, 15h00.
600m
Ce vol a
été réalisé avec un planeur motorisé Spirit de 2m d'envergure. Les
conditions météo : vent léger de Nord-Est en thermique pur (sans cumulus), 13°C. Le moteur a été utilisé 3 fois de courts
instants, jusqu'à entrer dans l'ascendance qui au début sous 200m était
assez dure à centrer, puis au-delà tout a été plus simple. Mon objectif
était de passer les 500m, puis grâce au suivi de la qualité du signal de
réception, c'est avec confiance que j'ai poursuivi la montée, étant
certain de ne pas perdre le modèle. A 600m c'est la visibilité qui m'a
fait arrêter, à cette altitude et compte tenu des 2m du Spirit, on se
contente de donner des directions, le planeur bien réglé se pilote seul.
Aux 600 m annoncés j'ai réalisé une autorotation pour redescendre à des
altitudes compatibles avec la taille du modèle et poursuivre mon vol.
Le récit du vol : Il est 15h00, la convection est bien établie, le
vent irrégulier marque le passage des ascendances. J’attends qu’une
bourrasque s’éloigne pour espérer lancer dans l’ascendance. J’effectue les
dernières vérifications et plein gaz. Sur les premières minutes du vol le
variomètre n’est pas optimiste, l’ascendance n’est pas au rendez-vous. A
130m je coupe pour voir. Le vario sonne continu et grave… Je chemine face
au vent espérant croiser l’air frétillant annonciateur de la colonne d’air
chaud. A 80m je décide de remettre le moteur pour une montée très molle
jusqu’à 180m pour autre plané. L’ascendance n’est pas loin, le vario
m’indique du -0.5 à 0m/s mais rien ne se concrétise. Je poursuis ma route
face au vent, rien. Je suis maintenant en dessous de 60m, je mets plein
gaz … Déjà 8 minutes depuis le décollage, il faut que je trouve
rapidement, l’autonomie du Spirit se réduit. Puis les sons du vario
prennent de la hauteur, j’approche de l’ascendance que j’estime à 1.5 –
2m/s au moteur. Je coupe en cheminant toujours face au vent, l’aile gauche
du Spirit se soulève bien que je contre aux commandes, la pompe est par
là, léger virage vers la gauche, petite ligne droite, le vario confirme,
ça monte enfin en spirale dans un petit 0.5m/s très irrégulier.
J’interroge à plusieurs reprises le SkyAssistant sur mon altitude afin de
confirmer que mon bilan est positif, c’est le cas. Je fais encore quelques
tours mais je suis convaincu qu’il y a mieux devant et si ce n’est pas le
cas j’y reviendrai. J’avance alors au vent, je chute légèrement pour
retrouver cette fois un bon 1.5m/s qui n’entraîne en spirale jusqu’à 200m…
ouf, me voilà sauvé.
L’ascendance qui devenait régulière m’abandonne d’un coup pour se
transformer en une bonne dégueulante. Je viens de me faire sortir de
l’ascendance mais qu’à cela ne tienne, je repars face au vent ce qui
finalement m’arrange beaucoup car le Spirit ayant dérivé lors de cette
montée se retrouvait à ma verticale rendant le vol inconfortable. Après
une transition d’une petite minute et 40m perdus, je retrouve les prémices
d’une ascendance qui se confirme rapidement. Je soigne mon pilotage et le
centrage de cette pompe qui me semble solide. Je dois ovaliser
régulièrement face au vent pour maintenir mon mètre par seconde. A 420m je
la perds un instant, j’ovalise ma spirale par une ligne droite face au
vent pour la retrouver encore meilleure, elle devient très régulière pour
1.2m/s. A cette altitude, le planeur semble un point rose fluo au milieu
du ciel bleu. Le Spirit se débrouille seul, j’interviens occasionnellement
pour recentrer l’ascendance. Dans du 2m/s, les 500m arrivent très vite, et
mon esprit est traversé par la peur et l’euphorie. La peur de ne plus
distinguer le planeur et de perdre le contact radio…, j’interroge le
SkyAssistant, me voilà rassuré, la tension batterie est à 4.9V, 8°C et pas
de problème dans la qualité du signal radio. Il m’en faudrait pas bien
plus pour que je m’imagine dans le cockpit du Spirit… Au sol ou dans le
planeur, quelle différence ? Une ascendance reste invisible et seuls les
sons lancinants du variomètre me permettent d’en imaginer le volume.
Je reviens
les pieds sur terre. A 600m je stoppe tout, il faut rester raisonnable. A
cette altitude l’ascendance est large, et sans intervention de ma part ce
brave Spirit peut monter jusqu’à la couche d’inversion prévue aujourd’hui
à 1200m.
A l’annonce
de l’objectif fixé je mets le Spirit en autorotation pendant une
quarantaine de secondes. Je préfère cette descente d’urgence à un taux de
chute de -5.5m/s moyen plutôt que des grandes vitesses qui vont solliciter
la structure de l’appareil. J’arrête ma vrille à 360m pour reprendre
l’ascendance à une altitude plus agréable pour la vue. Je bascule l’inter
3 positions vers l’arrière en mode silence pour profiter pleinement de ce
vol dans une longue descente.
La lecture
du graphique me permet par la suite de donner des valeurs exactes aux
ascendances et permettre ainsi de reconstituer mon vol avec précision. Il
ne me reste plus qu’à archiver le graphe pour peut être y revenir un jour
pluvieux d’automne…
Vol du 27 juin 2010, 14h00. 1014m
Toujours avec le Spirit motorisé. Pas de vent, 28°C et de magnifiques
cumulus. Je lance le Spirit au moteur plein pot, après 30 secondes et 100m
d'altitude je coupe en enroulant une bonne pompe qui me portera jusqu'à
1014m, altitude à laquelle je décide de la quitter par sécurité en
réalisant une autorotation. Sur le graphe en bleu foncé la vitesse du
planeur.
Configuration
Sur le terrain
sans PC
(qui va disparaître dans une prochaine mise à jour, au profit
d'autres fonctionnalités plus intéressantes)
Bien évidemment on ne peut pas toujours avoir son PC
sur le bord de la pente. Le SkyAssistant peut être paramétré par
l'intermédiaire de la voie PPM sur laquelle le vario est branché, par des
déplacements du manche ou inter dédié.
Au premier abord la prise en main n'est pas aisée.
Après quelques minutes de tâtonnement tout devient clair.
A la mise sous tension du skyAssistant, celui-ci s'initialise en faisant
l'inventaire de la configuration en cours (les infos passent via la radio
qui doit être en marche sur le bon canal). Si le manche dédié au vario
n'est pas déplacé au cours de l'initialisation, le SkyAssistant passe en
mode utilisation, prêt au décollage.
Si au cours de l'initialisation on déplace le manche
dédié, le vario pas en mode configuration.
A partir de là, la règle est simple :
- un déplacement de manche
(en + ou - 50% c'est idem) correspond à un changement de paramètre, de
menu
ou de valeur selon l'endroit ou l'on se trouve.
- pas de déplacement de manche est égal à une entrée dans un menu
ou une validation
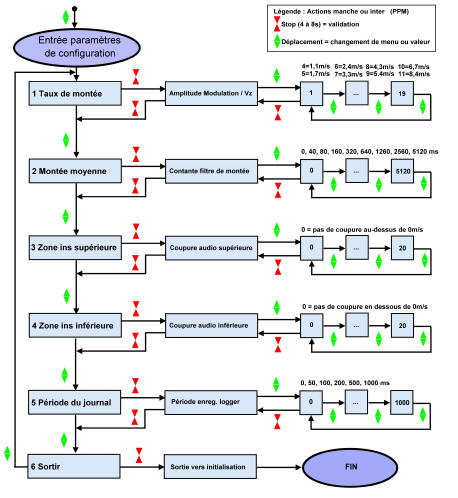
Que peux t'on modifier sur le terrain ?
Seuls les 5 paramètres les plus essentiels peuvent
êtres modifiés : 4 paramètres du menu Variomètre, 1 paramètre du menu
Logger (voir ces menus ci-dessus pour le détail). A noter qu'une
modification sur le terrain restera active sur le PC au retour qui
permettra pour certains paramètres de mettre une valeur en m/s sur le
nombre sélectionné.
- 1 Taux de montée ==> L'Amplitude
Tonalité / Vz : permet d'adapter
l'amplitude en fonction des Vz du moment. Abaisser l'amplitude si les Vz sont
faibles et pouvoir profiter de toute l'amplitude du son ou au contraire si
les Vz sont importantes pouvoir augmenter cette amplitude pour éviter tout
d'abord d'avoir l'audio en "butée sonore" en permanence et du coup pouvoir
afiner le centrage de ascendances fortes. Pas de valeur en Vz mais un
nombre de 1 à 19. Il faudra alors y aller par pas de 1 en + ou - et
tester. Avec l'expérience on fini toujours par utiliser les mêmes
configurations. Pour info : 1=1.1m/s, 2=1.7m/s, 3=2.4m/s, 4=3.3m/s,
5=4.3m/s, 6=5.4m/s, 7=6.7m/s, 8= 8.1m/s .... je m'arrête là car je pense
n'avoir jamais à utiliser les suivantes sauf peut être dans un
Cumulonimbus ;-)))
Personnellement j'utilise (5) 4.3 m/s.
- 2 Montée moyenne ==> La constante du filtre de montée : c'est le
paramètre qui va permettre d'augmenter ou diminuer la sensibilité du
variomètre. Choisir entre 0, 40, 80, 160, 320, 640, 1280, 2560, 5120 ms. Personnellement je trouve que 320 m/s est très bien.
- 3 Zone d'insensibilité
supérieure ==> La coupure audio supérieure : Là c'est plus
compliqué car il n'y pas de valeur. Choisir un nombre de 0 à 20. C'est
normal du fait que l'échelle des valeurs en m/s change avec le changement
de l'amplitude Tonalité/Vz. A changer par pas de 1 et tester, l'expérience fera
le reste. Personnellement j'utilise (1) + 0.05 m/s
- 4 Zone
d'insensibilité inférieure ==> La coupure audio inférieure : idem .
Choisir un nombre de 0 à 20 Personnellement j'utilise (7) - 0.32 m/s
- 5 Période du journal
==> La période d'enregistrement du logger :
choisir entre 0, 50, 100, 200, 500, 1000 ms. Personnellement j'utilise 200 ms.
- 6 Sortir ==> Sortie
vers initialisation : Permet de retourner vers l'initialisation du
SkyAssistant.
Cliquer pour imprimer la fiche de terrain 10x11cm (en pdf)
Les
paramètres tournent en boucle, tout
comme les sous menus d'ailleurs.
Manipulation virtuelle :
Je suis sur le terrain , je souhaite changer la "Constante du filtre de
montée" pour la passer de 80ms à 160ms car je trouve que mon vario est
trop sensible aux variations d'altitude.
Je met le SkyAssistant sous tension, dès le début de l'initialisation je
déplace le manche ou inter dédié, le SkyAssistant bascule en mode
configuration. Il commence à passer les 5 paramètres programmables en
revue à chaque fois que je déplace mon manche. Pour cette démonstration
virtuelle, je fais un tours des paramètres pour le "fun" ... A chaque fois
que je bascule le manche, je passe au paramètre suivant (1 : Taux de
montée, 2 : Montée moyenne, ...). 6 déplacements de manche
après, j'ai fait un tour complet des paramètres. Là je suis attentif, je
déplace une fois encore le manche, le vario m'annonce 2 "Taux de
montée" (sur lequel je dois m'arrêter). C'est ce paramètre que
je veut modifier, je ne touche plus à rien. 6 secondes plus tard, j'entre
dans le menu "Amplitude tonalité/Vz" et à chaque déplacement de manche je vais passer les valeurs
en revue 0, 40, 80,..,5120ms, ... Je bascule le manche jusqu'à ce que le SkyAssistant m'indique 160ms, là je ne touche plus à rien, 6 secondes plus
tard les 160ms sont validées, je retourne automatiquement dans
l'inventaire des paramètres, en l'occurrence ici le paramètre 3 (puisque
jusqu'alors j'étais dans le 2). Pour sortir, je bascule pour passer les
paramètres 4, 5, 6 : "Sortir" , là je touche plus à
rien, 6 secondes plus tard la validation s'effectue, le vario sort de la
configuration pour terminer son initialisation et passer en mode
utilisation.
C'est très abstrait en lisant le texte mais
simple en manipulation.
Je regrette une seule chose :
Pour les menus 1, 3 et 4 on ne peut pas connaître la valeur en m/s au lieu
d'un nombre qui ne veut pas dire grand chose. On peut le découvrir par la
suite en connectant le SkyAssistant au PC.
Avis des
utilisateurs
Avis de Jean Pierre Hanne lors de sa première
utilisation. Jean pierre utilise aussi le Wstech.
Au décollage , il
me donne 3 a 4m au sol et a l'atterrissage une fois posé
il m'annonce 11m et ensuite il descend a 2.8m .Donc je suis septique sur
les valeurs annoncées en vol .
De part mon
habitude avec le WStech je me rend compte "visuellement " qu'il
y a cette inertie entre l'annonce et la réalité de l'altitude et
pourtant sur les graphs cela a l'air parfait . A un moment vers la fin
du vol j'ai fait 2 loopings et ensuite un tonneau ,et cela se vois
parfaitement sur le graph ( début a -16.8 m/s ).
Par contre la
compensation du tube de pitot a l'air de fonctionner parfaitement. A
suivre !
La température (sonde
collée au double face sur le moteur) est correct , mais ce matin j'ai
modifié: la sonde a été collé sur une lamelle de cuivre coté méplat et
mis en contact direct sur le moteur ,les valeurs vont être plus précises
.
Le voltage : je suis en
lippo et sortie régulée a 5.4 Volts , j'ai eu souvent des annonces a
5.3V qui n'apparaisse pas sur le graph (sauf une fois au décollage ).
La vitesse de monté est
parfaite max : 6.5 m/s env (qu'est ce +11.9 ??) je peux faire mieux ,car
cela fait 3 mois que je n'ai pas volé !!!
Bon voila ma première
impression du SA .. Qu'en pensez vous ?
Réponse à Jean Pierre :
Pour revenir sur l'inertie de l'altimètre, j'en
avais déjà parlé à Daniel, comme vous avez des engins qui grimpent aux
arbres, effectivement, pendant la durée du message votre moto planeur
continue de monter, ce qui explique certainement que tu emplafonnes
tes 200m. Je pense qu'avec l'habitude tu t'arrêteras au bon moment. Je
pense aussi que si tu dépasses de quelques 10aines de mètres c'est pas
bien grave, en tous cas mieux que ceux qui n'utilisent aucun système.
Le Wstech avait cette même inertie ou pas ? pouvais
tu vérifier l'altitude réellement atteinte pour comparer ? Si j'ai
bien analysé ton graphe, tu emplafonnes de 30m à priori.
J'ai le même problème que vous au décollage, c'est
rare que j'ai 0 m. Attention tout de même à laisser quelques minutes
au repos avant de décoller, le système détecte l'absence de mouvement
du planeur pour en déterminer qu'il est au sol et ainsi le remettre à
0 ou presque. C'est certainement ce qui s'est passé après ton
atterrissage (passage de 11 à 2.4m).
A savoir aussi, la pression peut changer au cours
d'un vol. Par exemple aujourd'hui il y a eu vers midi une variation de
pression à la baisse de 3 hPa en 1 heure soit pour un altimètre une
montée équivalente de 25.5m (en atmosphère OACI -1hPa = + 8.5 m). Pour
info, sur ma station météo, la variation à la baisse la plus
importante cette année 2009 était de 10 hPa/h le 19 janvier et la
hausse la plus importante de 11hPa/h le 23 janvier (données de ma
station météo automatique que vous pouvez consulter sur voiletech) qui
représenterai si j'avais décollé pendant cette heure là une baisse de
mon alti de 93m. J'ai eu souvent en vol en planeur grandeur des pb
comme celui-là après de longs vol de 5 à 8h des écarts de + de 150m
par rapport à mon décollage.
Tu me dis que tu as une montée de 6.5m, en
mesurant sur ton graphe je trouve pour tes montées une moyenne de 4.6m
si je ne me trompe pas à moins que l'on ne parle pas de la même chose.
J'ai fait un cliquer/glisser pour placer les barre verticales jaune
qui permettent de moyenner. La montée n'est pas régulière, ça oscille
de part et d'autre de la moyenne, d'ou le 11.9 m/s, d'ailleurs dans la
fraction de seconde qui suit le vario enregistre -1.17m/s, turbulence
peut être ?
As tu fait ce vol avec l'antenne de compensation
du Wstech ? quel temps faisait il ce jour là ?
Il faudrait arriver à placer les deux varios dans
le planeur, dans les mêmes conditions pour faire une bonne
comparaison, mais ça ne doit pas être facile.
A bientôt, Rémi.
Bonjour Remi
Alors réponse a tes questions :
Non le Wstech n'a pas cette inertie .
L'altitude réellement atteinte n'a été basé que sur le subjectif et
l'habitude avec le WStech .C'est pour ça que l'on envisage (si on peut
) avec Daniel de voler avec les deux varios embarqués ensemble dans le
même planeur ..
Pour le zéro au départ si tu regardes le graphe : il s'est écoulé
presque 10 min entre la mise en marche et le décollage.
Quand je disais 6.5m/s c'etait la vitesse max atteinte (sur le graphe
,au pif ! ) mais la moyenne est de 4.8m/s ( je l'ai su quand Daniel
m'a expliqué comment faire !!)
Oui tout le vol a été fait avec l'antenne du WS et il semblerai
qu'elle fonctionne pas mal .Car exemple : quand tu plonges pour prendre
de la vitesse le vario se tait ; tu l'entend a nouveau en haut de la
boucle , au moment ou la vitesse chute.
Il faisait un soleil magnifique et ciel bleu ce jour la , une seule
petite pompe entre la 27 et 31 min ,et j'ai eu l'impression d'une
grande sensibilité du vario , on le voit sur le graphe , car cette
pompe était trop petite pour s'enrouler dedans et à chaque passage je
prenais 1m ou 2 , et on le voit parfaitement .
C'est le 1er jour de beau temps que l'on a eu...
Amitiés
Jean pierre
Les utilisateurs satisfaits : Andréas Fricke, Marc
Santaluccia, François Cahour, Pierre Marthinet, moi
(si vous voulez vous ajouter à la liste, contactez moi !!!)
Mise à jour
de la version
en français
J'ai réalisé la traduction en français du logiciel et de la
notice simplifiée pour Pitlab.
En effet la traduction précédente était trop littéraire donc pas assez
technique, incomplète, utilisant un vocabulaire non adapté à une
utilisation modéliste et surtout vélivole.
Le logiciel :
Pour essayer le logiciel ou mettre à jour votre SkyAssistant,
télécharger la version 2.30.2.fr .
Le logiciel "Vario" ne s'installe pas mais se copie, le fichier est donc
à décompresser dans le
C:\Program Files, un raccourci à créer sur le bureau.
A la première utilisation, celui-ci est en langue anglaise et unité
anglosaxone (impériale). Il suffit de se rendre dans "Configuration" /
"Change language" pour choisir le Français (dans le dossier software).
Lorsque vous avez paramétré la langue et les unités, fermer le logiciel et
le réouvrir pour actualiser. Maintenant le SkyAssistant est en français.
Si vous avez lancé le logiciel sans être en possession du variomètre,
certains menus seront grisés donc inaccessibles.
La notice simplifiée :
C'est la notice qui figure dans l'emballage du SkyAssistant. Si vous
possédez un ancien modèle avec une notice comportant des erreurs de
syntaxe, téléchargez et imprimez.
Pour imprimer la notice en livret : télécharger le fichier pdf
"Imprimable en livret", imprimer les deux premières feuilles, retourner et
mettre dans le bon sens, puis imprimer les deux dernières feuilles.
L'aide en ligne du logiciel :
C'est l'aide qui est accessible depuis le logiciel dans le menu "Aide".
Pour ceux qui souhaitent avoir toutes les informations techniques et
procédures, c'est celle-là qui faut lire.
Il y a quelques soucis concernant la lecture du fichier d'aide avec le
système d'exploitation Windows 7 en 32 et 64 bits, ce problème doit être
résolu rapidement.
A télécharger ci-contre.
Télécharger :
SkyAssistant
version 2.30.2.fr
du 08/05/09
Notice simplifiée
Version 2.0 fr
du 19/01/2009
Notice Imprimable
en livret Version 2.0 fr
du 19/01/2009
Aide en ligne
du 08/05/09
Un
distributeur
en France
pour le
SkyAssistant
Depuis le début du mois de février 2009, AERO-PLANE
CENTER
est le distributeur pour la France du SkyAssistant en magasin et en vente
par correspondance. Cliquer sur le logo pour commander.
Nous évoluons aujourd'hui dans un monde qui va de plus en plus vite où
nous avons pris l'habitude d'avoir tout, tout de suite, livré la veille
pour le lendemain. Aéroplane Center me
signale que, compte tenue de son prix conséquent, il ne peut avoir un gros stock de SkyAssistant, le stock s'adaptant à la demande. Pitlab construit le
produit en juste à temps. De par le fait du hasard, un délai d'une 10aine
de jours est possible si plusieurs clients passent leur commande
simultanément. Soyez patient, le produit en vaut l'attente. Depuis le 1
mai 2009, les commandes directes à l'entreprise Pitlab ne sont plus
possibles, le SkyAssistant
ne peut être acheté exclusivement qu'au distributeur Français pour une
commande réalisée depuis la France.
Pour ceux qui souhaitent faire du
sondage basse couche ...
Modification
du
LM335
Sondage basses
couches
Dans le cas d'une utilisation du SkyAssistant pour réaliser un sondage
basse couche, il peut être souhaitable de modifier le capteur de
température LM335
en vue de diminuer au mieux son inertie thermique. En effet lors des
montées rapides le capteur met un temps certain à échanger sa température
interne avec le milieu extérieur et de fait, il existe toujours un retard
entre la température réelle et la température mesurée. La
modification permettra de passer d'un volume de 97.4 mm3 à un volume de
17.4 mm3 soit une réduction de 5.6 fois le volume d'origine.
La transformation
ci-dessous ne doit pas être réalisée avec le capteur d'origine. La
garantie ne prend pas en compte la détérioration éventuelle du capteur.
Acheter 2 à 3 capteurs LM335 (2 € / pièce) afin d'avoir du stock en cas
d'échec.
J'ai
réalisé la transformation à l'aide d'un touret à meuler (meule fine) mais
c'est tout à fait réalisable à la lime. Il faut surtout ne pas
s'empresser, surtout avec un touret à meuler qui attaque la matière
rapidement. Compter 20 bonnes minutes de travail sur la meule, y aller par
petites touches successives en mesurant régulièrement pour ne pas dépasser
la cote. Ne pas couper les pattes du composant de suite, c'est bien plus pratique
pour le manipuler.
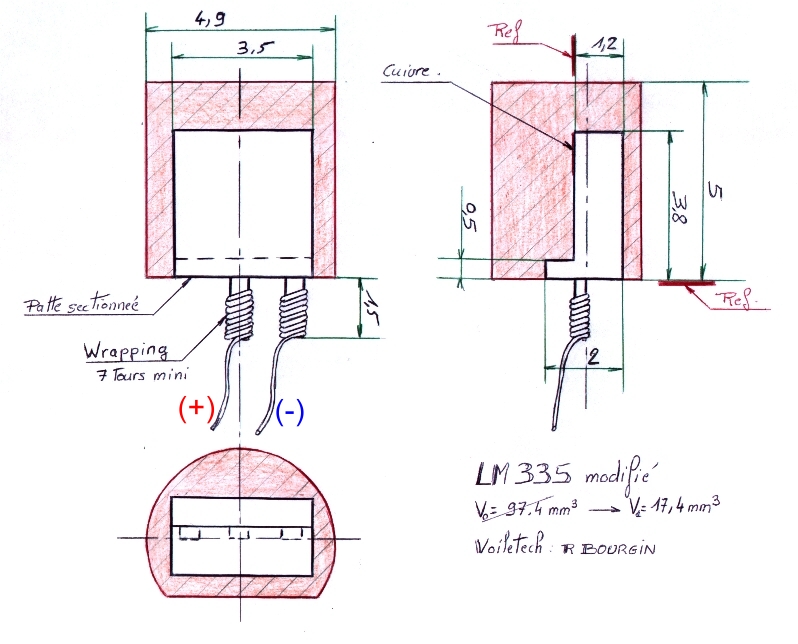
J'ai réalisé après coup le plan ci-dessous qui
pourra vous aider à vous arrêter à tant. Les parties en rouge sont à
meuler. Il vaut mieux s'arrêter trop top
que trop tard, dans la mesure où le 1/10 de mm supplémentaire n'augmentera
pas significativement l'inertie du capteur.
Cliquer
pour agrandir
Dans l'ordre : Attention : pour les mesures
verticales j'ai pris la base du composant comme référence. D'autre part,
pour les mesures horizontales, la référence n'apparaîtra qu'après
réalisation de l'étape 4.
1 Commencer par meuler le dessus du composant en
respectant la cote. Lorsque vous arrivez à la cote de 3.8 mm, vous
rencontrez un rectangle de cuivre qui correspond au sommet de la patte du
composant. Il est important de bien voir ce rectangle de cuivre car c'est
ce qui va nous guider pour meuler l'épaisseur par la suite. 2
Meuler ensuite la partie cylindrique du composant en essayant de rester le
plus parallèle possible au plan opposé. Vous pouvez meuler sans réfléchir
jusqu'à une distance de 0.8 mm des pattes. 3
Là j'ai par sécurité laissé une surépaisseur au droit de la base des
pattes afin de laisser une résistance mécanique suffisante pour les
manipulations futures. 4
Meuler maintenant avec précaution en laissant bien ce décalage à la base jusqu'à
atteindre la partie latérale en cuivre des pattes du composant. Pour vous
aider à apprécier ce qui reste à meuler, observer le dessus du composant,
en particulier la partie cuivre des pattes. Dès que vous apercevez le
rectangle en cuivre, il faut s'arrêter impérativement. Pour la réalisation
de cette étape, aucune mesure n'est à prendre, tout est visuel. 5
Il ne reste plus qu'à meuler la partie plane d'origine en faisant
disparaître les références du composant, en respectant impérativement la
cote de 1.2 mm, sous peine d'attaquer la partie vitale du composant.
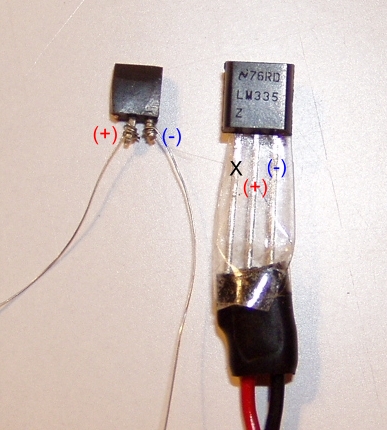
Lorsque votre LM335 est taillé, il faut le tester.
Souder deux fils en repérant bien la polarité, rebrancher l'ensemble sur
le SkyAssistant et tester. Vous ne devez pas observer de données
farfelues.
Dessouder les fils et couper les pattes du LM335 en
respectant le plan. La
patte "adjustement" doit être sectionnée à la base du composant (non
utilisée), les pattes + et - seront coupées à 1.5 mm de la base afin de
réduire le volume. L'objectif de l'opération étant de réduire l'inertie
thermique, il n'est pas judicieux de venir souder un fil sur ces pattes,
en effet la soudure représentera une masse inerte. J'ai choisi d'utiliser
la bonne vieille méthode du Wrapping.
Prendre un brin de 50 mm sorti d'un fil de connexion
multibrins et le rouler en effectuant une traction sur ce fil. La règle du
wrapping étant de faire au moins 7 tours pour un contact électrique
optimum.
Tester éventuellement le Wrapping en soudant
l'extrémité des brins et en branchant sur le SkyAssistant.
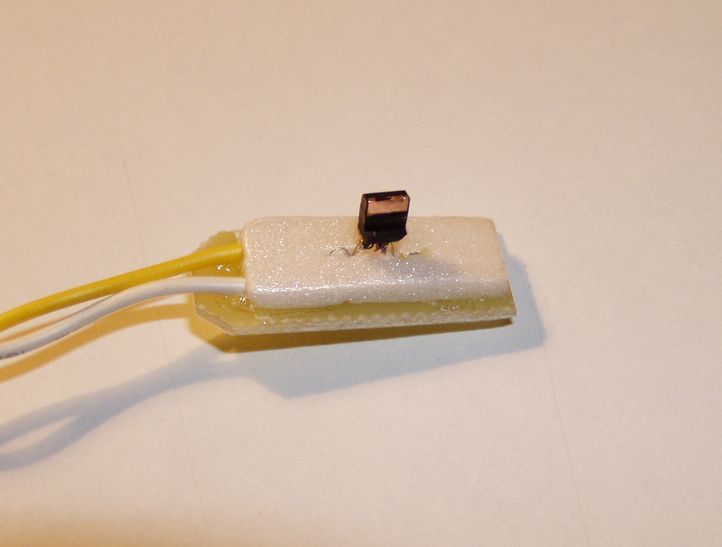
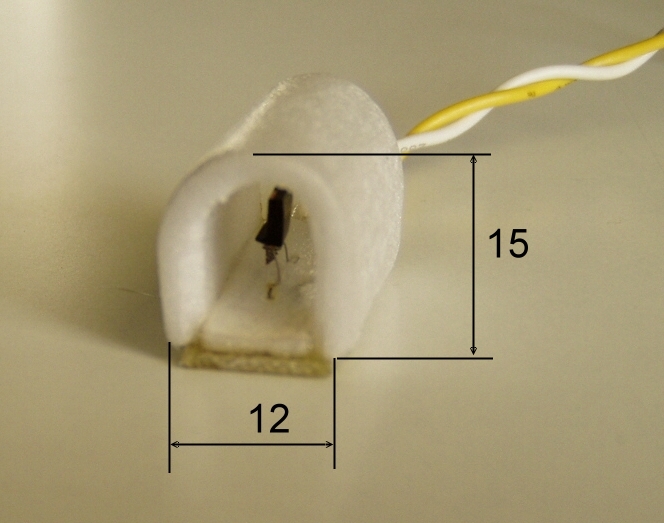
Il ne reste maintenant plus qu'à réaliser un support au
composant modifié. J'ai choisi de le poser sur du Dépron de 3 mm (isolant
thermique) afin de limiter l'inertie. Le Dépron est collé sur du circuit
imprimé époxy de 1 mm afin d'avoir un support rigide. Pour éviter le
rayonnement direct du soleil j'ai placé un cache en Dépron. L'arrondi à
été réalisé en chauffant à proximité d'un fer à souder et en roulant
autour d'un stylo. La fixation du composant sur le modèle se fera au
Velours / Crochets ;-) plus communément appelé Velcro ou
scratch pour les intimes. La petite languette qui dépasse du capteur sert
à l'arracher de son support sans dommage lors de son démontage.
Dimensions hors tout du support : L=20+5 par l=12 par h=15
Le volume du LM335 est ainsi passé de V0 = 97.4 mm3 à V1 = 17.4 mm3 soit
une réduction de 5.6 fois volume d'origine.
Le capteur
ne sera installé sur le modèle que pour des opérations de sondage, le capteur d'origine
faisant très bien l'affaire pour une utilisation standard.
Pour toutes infos complémentaires : remib12@aol.com